Moment
Moment
3. Moment einer Einzelkraft
3.2. ... mathematisch darstellen
Moment einer Einzelkraft
...mathematisch darstellen
Wenn es darum geht, das Moment einer Einzelkraft mathematisch darzustellen, also den Momentenvektor in Koordinaten anzugeben, hast du grundsätzlich zwei verschiedene Möglichkeiten:
- auf Basis des eben betrachteten mechanischen Verständnisses (Abschnitt 1)
- durch direktes Anwenden des Kreuzproduktes (Abschnitt 2)
Beide Wege führen selbstverständlich zu demselben Ergebnis.
Da dieses Kapitel recht lang ist, kannst du oben durch Klicken direkt zu Abschnitt 1 bzw. Abschnitt 2 springen.
Jeder Abschnitt hat seine eigene Zusammenfassung und seine eigenen Arbeitsmaterialien.
Mechanisches Verständnis mit an Board zu haben, ist immer vorteilhaft. Gleichzeitig gibt es natürlich auch Anwendungsfälle, in denen 'nur Rechnen' ausreichend oder hilfreich ist.
Bei ebenen Systemen ist der Ansatz über das Kreuzprodukt in der Regel "überkandidelt". Bei räumlichen Systemen kann es mit der mechanischen Verständnis über die Anschauung je nach Komplexität des Systems unübersichtlich werden. Und da die Berechnung mit Kreuzprodukt immer funktioniert, ist sie gerade bei diesen Systemen oft eine gute Wahl. Die Anschauung kann dann dazu dienen, berechnete Ergebnisse einem Plausibilitätscheck zu unterziehen.
Versuche also, beide Wege zu nutzen, damit du dann flexibel entscheiden kannst, welcher Weg in welcher Situation der für dich passender ist.
Wichtig ist: erst jetzt benötigst du ein Koordinatensystem. Alle Überlegungen zum mechanischen Verständnis haben wir komplett ohne Verwendung eines Koordinatensystems ausgeführt.
Abschnitt 1:
Auf Basis des mechanischen Verständnisses
das Moment einer Einzelkraft mathematisch darstellen
Mit dem mechanischen Verständnis aus dem vorangegangenen Abschnitt im Gepäck weißt du ja schon, in welche Richtung der Momentenvektor einer Einzelkraft bei einem gewählten Bezugspunkt zeigt und welchen Betrag er hat.
Wenn es jetzt also darum geht, den Vektor mathematisch zu beschreiben, musst du diese Informationen nur noch als Vektor bezüglich eines Koordinatensystems darstellen. Es ist also genau dasselbe Vorgehen, das du schon beim Moment eines Kräftepaars kennengelernt hast.
Machen wir es auch hier gleich konkret und greifbar und nehmen die beiden Beispiele aus der Zusammenfassung des vorherigen Kapitels. Dann kannst du das Vorgehen gleich einmal für den ebenen Fall und einmal für den räumlichen Fall anwenden.
Wir starten mit dem Beispiel des ebenen Systems und wählen als erstes ein Koordinatensystem ... genauer gesagt zwei: dann kannst du gleich selbst ausprobieren, was es genau bedeutet, dass die Darstellung des Vektors unterschiedlich ist, je nach gewähltem Koordinatensystem.
Grundsätzlich kannst du dir Koordinatensysteme wählen, so wie "du lustig bist". An der Mechanik ändert sich dadurch rein gar nichts. Einzig und allein die mathematische Darstellung kann, \(-\) je nach gewähltem Koordinatensystem \(-\) einfacher oder schwieriger sein.
Betrachten wir noch einmal die Momentenwirkung der Kraft \( \vec{F}_1 \).
Du siehst, dass ich zwei Koordinatensysteme gewählt habe:
das magenta-farbene und das orange.
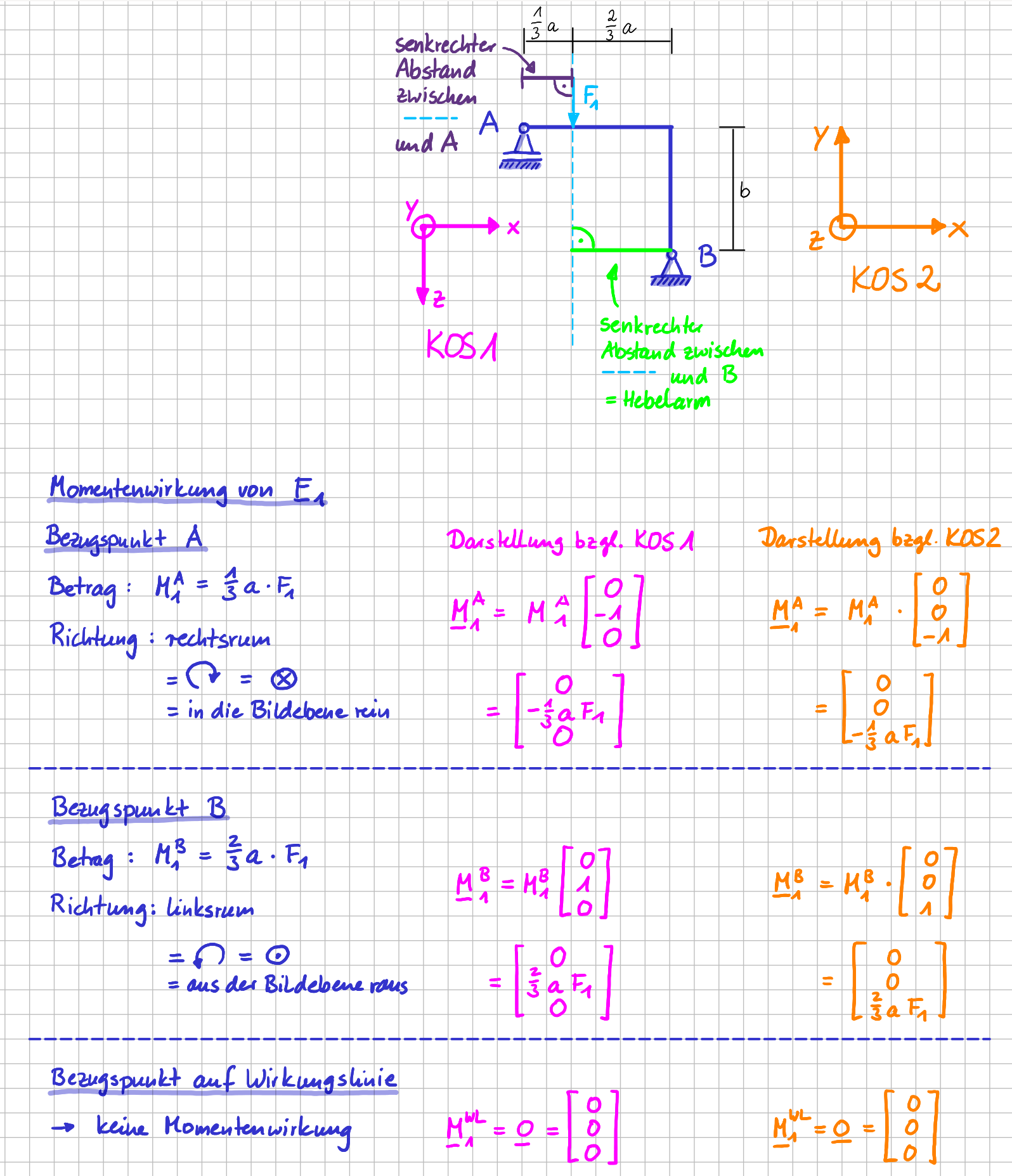
Mathematische Darstellung der Momentenvektoren der Kraft \(\vec{F}_1\) bezüglich zwei verschiedener Koordinatensysteme
Weitere Informationen
Johanna Peters - Mechanik hautnah | TU Hamburg
CC BY 4.0-Lizenz
https://learn.hoou.de/pluginfile.php/13818/mod_book/chapter/2177/Mathematische_Darstellung_Momentenvektor_verschiedene_KOS.png
Betrag und Richtung der Momentenvektoren bezüglich der drei verschiedenen Punkte (\( A \), \( B \), Punkt auf Wirkungslinie) sind ja schon klar. Das haben wir uns ja eben im Kapitel "mechanisch verstehen" bereits überlegt.
Hier geht es jetzt also 'nur' noch darum, diese Vektoren bezüglich der beiden Koordinatensysteme darzustellen. Da es sich um ein ebenes System handelt, zeigen die Momentenvektoren alle in Richtung der Achse senkrecht zur Bildebene, was im Fall des magenta-farbenen KOS die \( y \)-Achse ist. Das Vorzeichen der \( y \)-Komponente ist für den Momentenvektor mit \( A \) als Bezugspunkt negativ, da der Momentenvektor "in den Bildschirm hinein", also in Richtung der negativen \( y \)-Achse zeigt.
Für \( B \) als Bezugspunkt ist es genau umgekehrt, weshalb der Eintrag in der \( y \)-Komponente ein positives Vorzeichen hat.
Bei einem Punkt auf der Wirkungslinie als Bezugspunkt für das Moment der Kraft \( \vec{F}_1 \) ist der Momentenvektor ohnehin der Nullvektor.
Nach der gleichen Vorgehensweise kannst du dir auch die Darstellung der Momentenvektoren bezüglich des orangen Koordinatensystems überlegen.
Mit dem mechanischen Verständnis im Gepäck war dieser Schritt doch jetzt ganz einfach, oder? Wenn du das anders siehst, da du dich mit Vektoren noch nicht so gut auskennst, dann arbeite doch gerne an dieser Stelle erstmal die Lektion "Vektorrechnung" durch.
An dieser Stelle lohnt es sich, noch einen anderen Anwendungsfall für die Rechte-Hand-Regel für Momente kennenzulernen.
Stell dir vor, du hast ein mechanisches System gegeben, bleiben wir wegen der Einfachheit des Zeichnens bei einem ebenen System. Das Koordinatensystem ist so vorgegeben, dass die \( x -\)Achse nach rechts und die \( z- \)Achse nach unten zeigt. Dann ist klar, dass die Momentenwirkung, die aus der Kraft \( \vec{F} \) resultiert, in Richtung der \( y -\)Achse zeigt.
Mit der Rechte-Hand-Regel kannst du jetzt schnell prüfen, ob es sich um ein positives Moment bezüglich der \( y- \)Achse handelt.
Fangen wir mit \( C \) als Bezugspunkt an:
Schritt 1: Leg deine rechte Hand als Faust in Punkt \( C \).
Schritt 2: Streck den Daumen in Richtung der \( y -\)Achse aus.
Schritt 3: Prüfe, ob der 'Drehsinn' der Kraft \( \vec{F} \) in Richtung oder entgegen der Richtung der restlichen Finger ist. Ist der 'Drehsinn' in Richtung der restlichen Finger, handelt es sich um ein positives Moment in Richtung der \( y- \)Achse. Du kannst auch "Es handelt sich um ein positives Moment um die \( y- \)Achse." sagen.
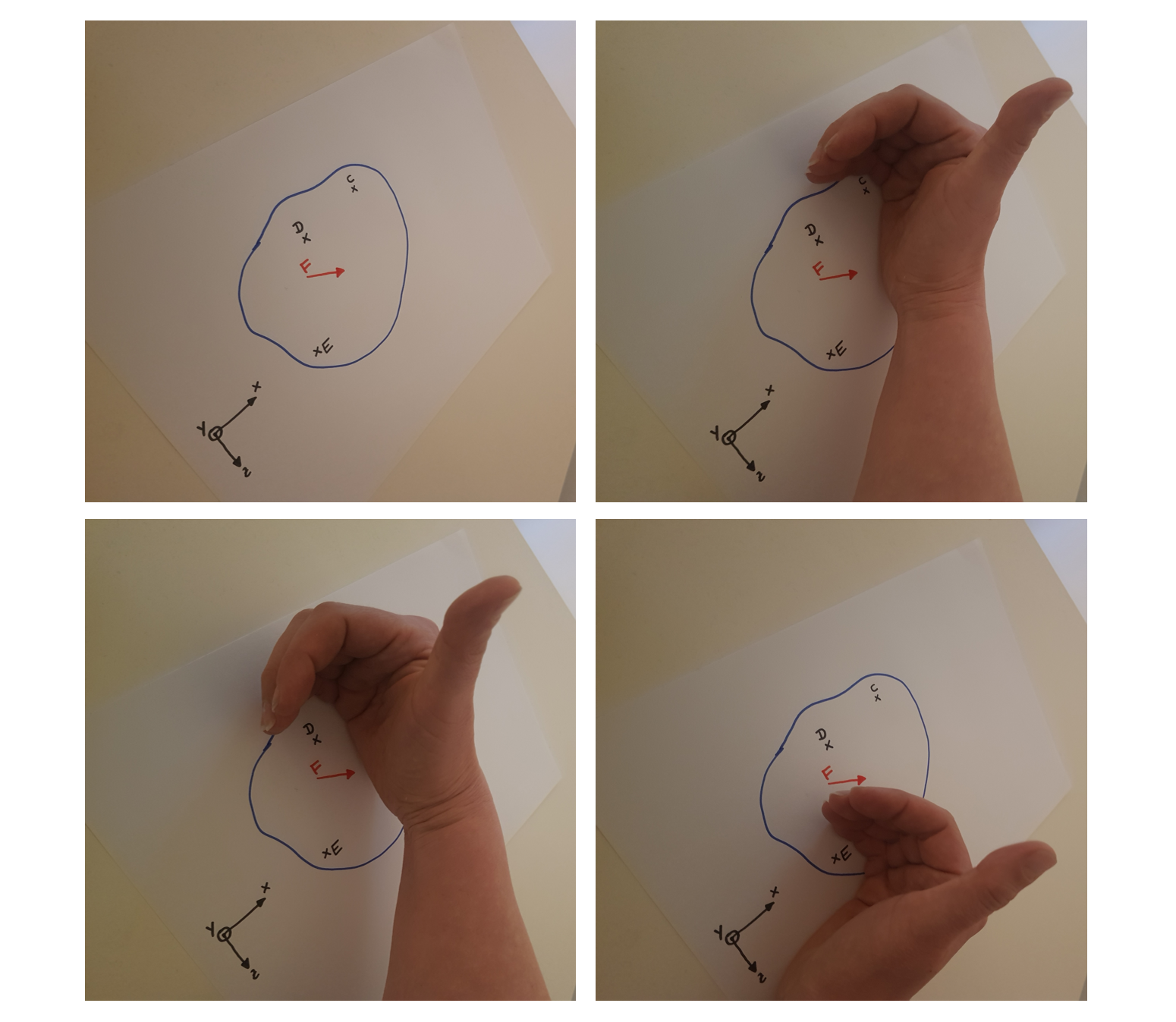
Überprüfen des Vorzeichens eines Momentes in Abhängigkeit vom Bezugspunkt
Weitere Informationen
Johanna Peters - Mechanik hautnah | TU Hamburg
CC BY 4.0-Lizenz
https://learn.hoou.de/pluginfile.php/13818/mod_book/chapter/2177/Ueberpruefen_Vorzeichen_Moment_Einzelkraft_Bezugspunkt%20%281%29.png
Das Moment der Kraft \( \vec{F} \) bezüglich Punkt \( C \) ist also positiv. Dasselbe gilt für Punkt \( D \) als Bezugspunkt. Bei Punkt \( E \) ist es anders: der Drehsinn ist entgegen der restlichen Finger und damit ist das Moment negativ.
Zusammenfassung - Das Wichtigste in Kürze
Mit der Rechte-Hand-Regel für Momente kannst du prüfen, ob die Momentenwirkung einer Einzelkraft bzgl. einer Koordinatenachse positiv oder negativ ist.
Vorgehen:
Schritt 1:
Leg deine rechte Hand als Faust in den Bezugspunkt.
Schritt 2:
Streck den Daumen in die positive Richtung derjenigen Achse aus, um die das Moment wirkt.
Schritt 3:
Prüfe, ob der 'Drehsinn' der Kraft in Richtung oder entgegen der Richtung der restlichen Finger ist. Ist der 'Drehsinn' in Richtung der restlichen Finger, handelt es sich um ein positives Moment. Du kannst auch "Es handelt sich um ein positives Moment um diese Achse." sagen.
Die Wirkungslinie der Kraft \(\vec{F}\) und die Punkte \(C\) , \(D\) und \(E\) liegen in der \(xz-\)Ebene. Damit ist klar, dass die Momentenwirkung der Kraft \(\vec{F}\) in Richtung der \(y-\)Achse zeigt.
Mit der Rechte-Hand-Regel ergeben sich folgende Vorzeichen:
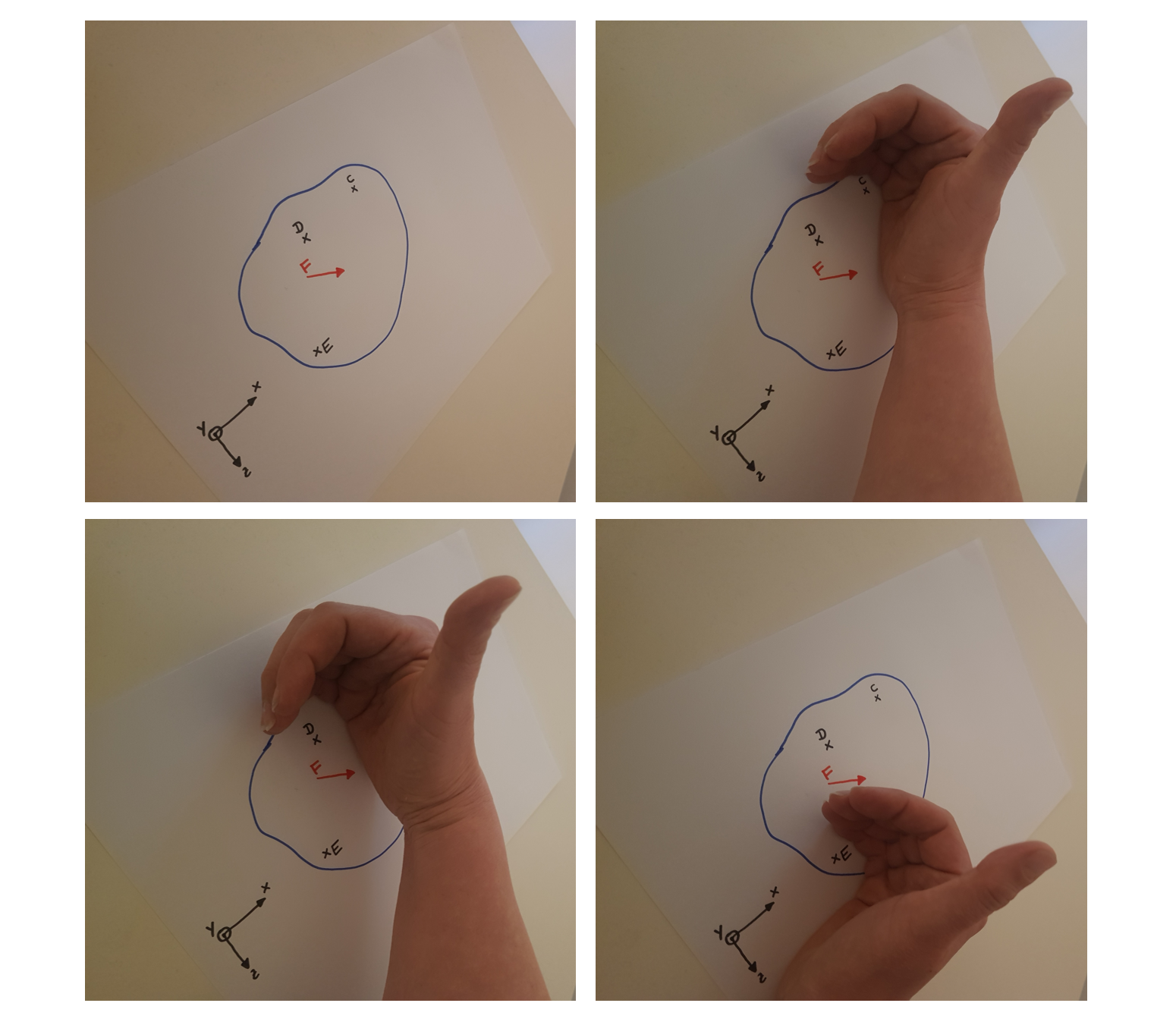
Beispiel: Rechte-Hand-Regel für Momentenwirkung einer Einzelkraft
Weitere Informationen
Johanna Peters - Mechanik hautnah | TU Hamburg
CC BY 4.0-Lizenz
https://learn.hoou.de/pluginfile.php/13818/mod_book/chapter/2177/Ueberpruefen_Vorzeichen_Moment_Einzelkraft_Bezugspunkt.png
Arbeitsblatt - Teste dein Wissen

Abschnitt 2:
Auf Basis des Kreuzproduktes
das Moment einer Einzelkraft mathematisch darstellen
Die Momentenwirkung einer Einzelkraft bezüglich eines bestimmten Bezugspunktes kannst du immer auch direkt über das Kreuzprodukt berechnen. Gerade in dreidimensionalen Systemen ist dies oft der schnellste Weg. Die Berechnungsvorschrift lautet:

Ebenes System für den Einstieg in die Berechnung des Momentes mit dem Kreuzprodukt: Teil 1
Weitere Informationen
Johanna Peters - Mechanik hautnah | TU Hamburg
CC BY 4.0-Lizenz
https://learn.hoou.de/pluginfile.php/13818/mod_book/chapter/2177/Ebenes_System_Moment_Kreuzprodukt_Teil1.png
Wenn du dich daran erinnerst, wie du vorgehen würdest, wenn du auf Basis des mechanischen Verständisses argumentierst, würdest du dir als erstes überlegen, dass das Moment um die \( z \)-Achse wirkt. Mit der Rechte-Hand-Regel für Moment würdest du feststellen, dass das Moment positiv ist. Und der senkrechte Abstand zwischen Punkt und Wirkungslinie ist die Länge \( \ell_2 \). Du könntest also nur mit dem mechanischen Verständnis den Vektor hinschreiben:
$$\vec{M}^A = \begin{pmatrix} 0 \\ 0 \\ \ell_2 \cdot F_H \end{pmatrix}.$$
Mal schauen, ob wir mit dem Kreuzprodukt wirklich auf dasselbe Ergebnis kommen.
Der Vektor \( \vec{r} \) kann wie gesagt ein Vektor vom Bezugspunkt zu einem beliebigen Punkt auf der Wirkungslinie sein. Nehmen wir doch einfach den, der von \( A \) senkrecht nach oben zeigt, das sei \( \vec{r}_{\mathrm{senkrecht}}\) und den, der von \( A \) zum Angriffspunkt der Kraft zeigt, das sei \( \vec{r}_{\mathrm{Angriffspunkt}} \). Dann gilt für die Ortsvektoren und das Kreuzprodukt mit der Kraft \( \vec{F}\):
$$
\vec{r}_{\mathrm{senkrecht}}=\begin{pmatrix} 0 \\ \ell_2 \\ 0 \end{pmatrix} \qquad\vec{r}_{\mathrm{Angriffspunkt }}=\begin{pmatrix} \ell_1 \\ \ell_2 \\ 0 \end{pmatrix} \qquad \vec{F_H}=\begin{pmatrix} -F_H \\ 0 \\ 0 \end{pmatrix}
$$
$$
\rightarrow \vec{M}^A = \vec{r}_{\mathrm{senkrecht}} \times \vec{F_H}=\begin{pmatrix} 0 \\ \ell_2 \\ 0 \end{pmatrix} \times \begin{pmatrix} -F_H \\ 0 \\ 0 \end{pmatrix} = \begin{pmatrix} 0 \\ 0 \\\ell_2 \cdot F_H \end{pmatrix}
$$
$$
\rightarrow \vec{M}^A = \vec{r}_{\mathrm{Angriffspunkt}} \times \vec{F_H}=\begin{pmatrix} \ell_1 \\ \ell_2 \\ 0 \end{pmatrix} \times \begin{pmatrix} -F_H \\ 0 \\ 0 \end{pmatrix} = \begin{pmatrix} 0 \\ 0 \\\ell_2 \cdot F_H \end{pmatrix}
$$
Es ist also in der Tat egal, welchen Vektor vom Bezugspunkt zur Wirkungslinie du verwendet: Es kommt derselbe Momentenvektor heraus.
Was kannst du daraus schlussfolgern:
Das, was du beim Bestimmen des Momentes über das mechanische Verständnis in Einzelschritten machst (1. Überlegen, in welche Richtung das Moment zeigt, 2. Hebelarm, also senkrechten Abstand bestimmen, um Betrag der entsprechenden Momentenkomponente zu berechnen) macht das Kreuzprodukt also 'alles in Einem' und ganz automatisch.
Das bedeutet selbstverständlich nicht(!), dass du ab sofort alle Momentenwirkungen von Einzelkräften mit dem Kreuzprodukt berechnen solltest. Ganz im Gegenteil. Wo immer es geht, nutze das mechanische Verständnis als Basis. Und selbst bei räumlichen Systemen, bei denen du vermutlich meistens das Kreuzprodukt nutzen wirst, kannst du deine Ergebnisse immer noch mit deinem mechanischen Verständnis kontrollieren.
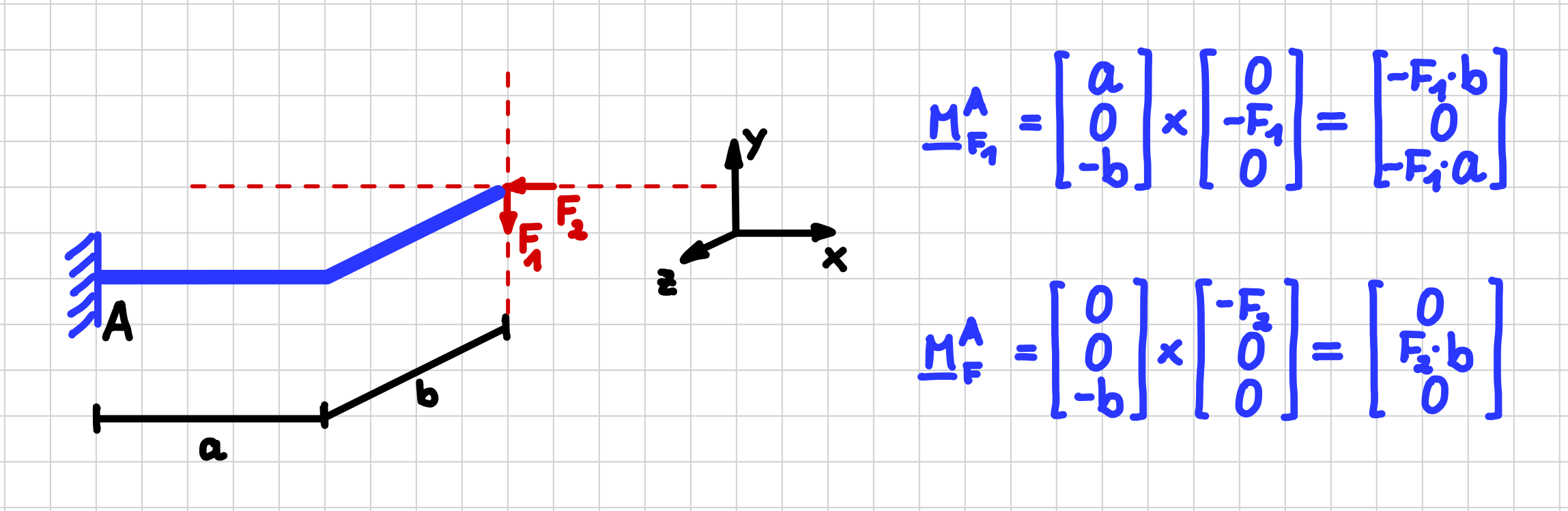
Lass uns das System von eben noch ein bisschen erweitern und eine vertikale Kraftkomponente dazunehmen.

Ebenes System für den Einstieg in die Berechnung des Momentes mit dem Kreuzprodukt: Teil 2
Weitere Informationen
Johanna Peters - Mechanik hautnah | TU Hamburg
CC BY 4.0-Lizenz
https://learn.hoou.de/pluginfile.php/13818/mod_book/chapter/2177/Ebenes_System_Moment_Kreuzprodukt_Teil2.png
$$\vec{M}^A = \begin{pmatrix} 0 \\ 0 \\ \ell_2 \cdot F_H - \ell_1 \cdot F_V \end{pmatrix}.$$
Über das Kreuzprodukt, wenn du den Angriffspunkt für die Bestimmung des Ortsvektors nimmst, sieht das Ganze so aus
$$
\vec{M}^A = \vec{r}_{\mathrm{Angriffspunkt}} \times (\vec{F}_H+\vec{F}_V)=\begin{pmatrix} \ell_1 \\ \ell_2 \\ 0 \end{pmatrix} \times \begin{pmatrix} -F_H \\ -F_V \\ 0 \end{pmatrix} = \begin{pmatrix} 0 \\ 0 \\\ell_2 \cdot F_H - \ell_1 \cdot F_V\end{pmatrix}.
$$
Es kommt selbstverständlich wieder auf beiden Wegen dasselbe heraus. Und vielleicht wirst du mir zustimmen, dass es schneller ist, über das mechanische Verständnis auf den Momentenvektor zu kommen, als über das Kreuzprodukt.
Exkurs zum weiteren Nachdenken
Für alle, die noch ein bisschen mechanisch denken und ausprobieren mögen: Lass uns mit diesem Beispiel noch einen Schritt weiter gehen. Du könntest die Kräfte \( \vec{F}_H \) und \( \vec{F}_V \) ja auch als Komponenten der Kraft \( \vec{F}_{Res} \) sehen.

Ebenes System für den Ebenes System für den Einstieg in die Berechnung des Momentes mit dem Kreuzprodukt: Teil 3a
Weitere Informationen
Johanna Peters - Mechanik hautnah | TU Hamburg
CC BY 4.0-Lizenz
https://learn.hoou.de/pluginfile.php/13818/mod_book/chapter/2177/Ebenes_System_Moment_Kreuzprodukt_Teil3a.png
Stell dir vor, dass das System von Anfang an wie im rechten Teil der vorherigen Abbildung dargestellt, gegeben wäre.

Ebenes System für den Ebenes System für den Einstieg in die Berechnung des Momentes mit dem Kreuzprodukt: Teil 3b
Weitere Informationen
Johanna Peters - Mechanik hautnah | TU Hamburg
CC BY 4.0-Lizenz
https://learn.hoou.de/pluginfile.php/13818/mod_book/chapter/2177/Ebenes_System_Moment_Kreuzprodukt_Teil3b.png
Wenn du versucht hättest, über das mechanische Verständnis den Vektor, der die Momentenwirkung bezüglich des Punktes \( A \) beschreibt, aufzustellen, hättest du vermutlich erstmal "Hebelarm mal Kraft" gedacht und versucht den orange eingezeichneten Hebelarm zu bestimmen, oder? Dann hättest du gemerkt, dass das auf den ersten Blick vielleicht gar nicht so einfach ist und dich gefragt, ob das nicht auch einfacher geht. Klar hättest du die Kraft \( F_{Res} \) jetzt in ihre Komponenten zerlegen und dann mit den einzelnen beiden Hebelarmen der Kraftkomponenten rechnen können. Das ist dann wieder die Rechnung wie im vorangegangenen Schritt. Du hättest dich aber auch daran erinnern können, dass du für die Berechnung von Lagerreaktionen Kräfte ja entlang ihrer Wirkungslinie verschieben kannst. Du könntest die Kraft \(F_{Res}\) also in den Punkt \(B\) verschieben und dort in Komponenten zerlegen. Dann würdest du sofort sehen, dass es nur der vertikale Anteil der Kraft ist, der ein Moment mit dem Hebelarm \( \frac{3}{4}\ell_1 \) in negativer Richtung hat, also $$ \vec{M}^A = \begin{pmatrix} 0 \\ 0 \\ - \frac{3}{4} \ell_1 \cdot F_V \end{pmatrix} $$ gilt. Wenn du von Anfang an mit dem Kreuzprodukt rechnen würdest, könntest du z.B. den Vektor von \( A \) nach \( B \) als Ortsvektor zu einem Punkt auf der Wirkungslinie der Kraft wählen. Dein Kreuzprodukt sähe dann also so aus: $$ \vec{M}^A = \vec{r}_{AB} \times \vec{F}_{Res}=\begin{pmatrix} \frac{3}{4}\ell_1 \\ 0 \\ 0 \end{pmatrix} \times \begin{pmatrix} -F_H \\ -F_V \\ 0 \end{pmatrix} = \begin{pmatrix} 0 \\ 0 \\ - \frac{3}{4} \ell_1 \cdot F_V\end{pmatrix}. $$ Du siehst: es gibt also verschiedene Wege, um die Momentenwirktung einer Einzelkraft zu bestimmen. Wie immer gilt: Probiere an ein und derselben Aufgabe immer wieder mal verschiedene Wege aus. So kannst du deine ganz eigenen Erfahrungen sammeln, welchen Weg DU wann am sinnvollsten anwenden kannst.
Momentenwirkungen berechnest du ja zum Beispiel immer dann, wenn du Gleichgewichtsbedingungen für ein freigeschnittenes System aufstellst.
Lass uns beim folgenden System einfach mal schauen, wie die Momentenwirkung der Kraft \( 2F \) bezüglich unterschiedlicher Bezugspunkte ist.
Bei der Wahl des Ortsvektors kannst du es dir möglichst einfach machen: du brauchst ja nur einen Vektor vom Bezugspunkt zu irgendeinem Punkt auf der Wirkungslinie der Kraft.
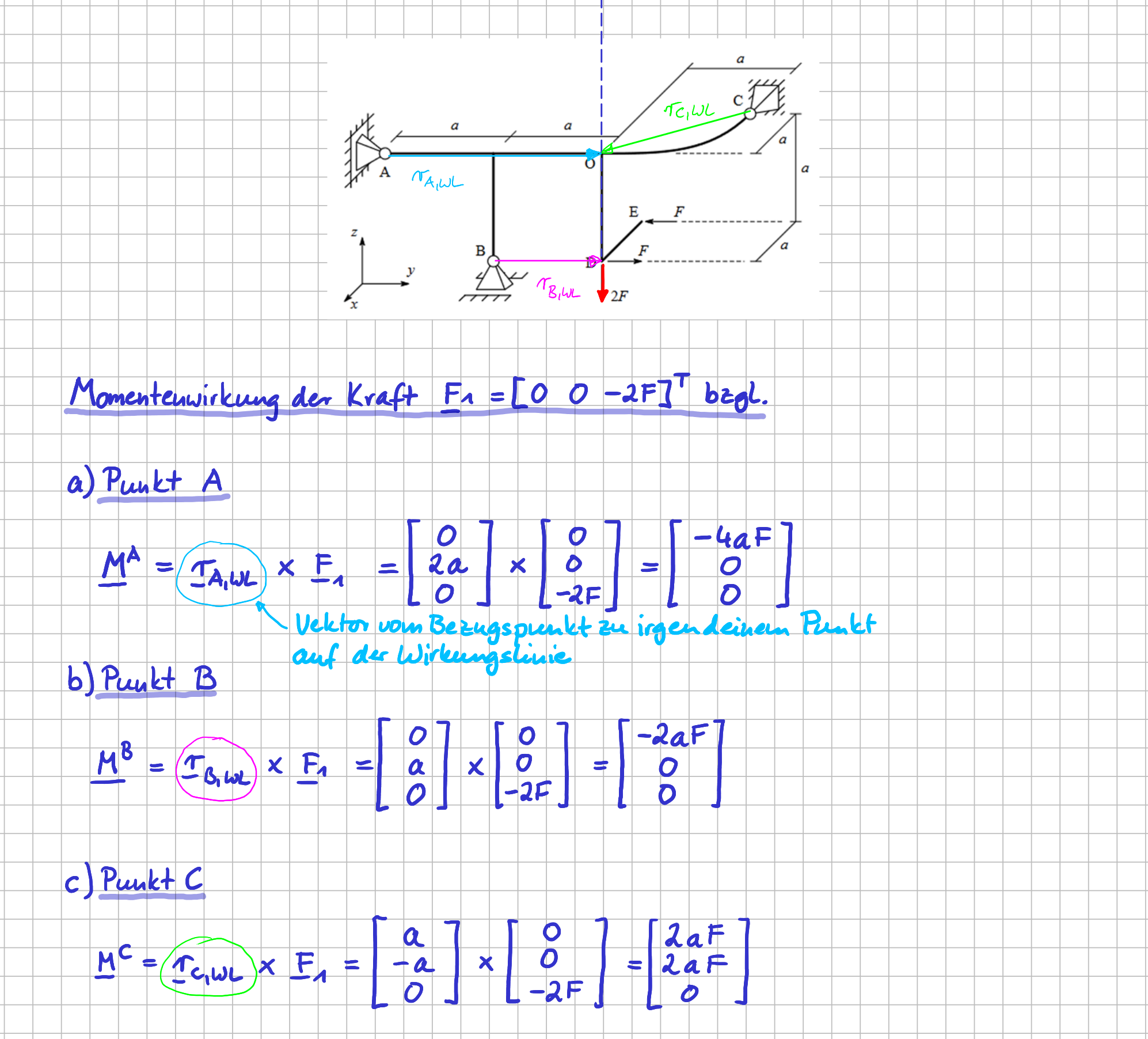
Berechnung des Momentenvektors einer Einzelkraft in einem räumlichen System: verschiedene Bezugspunkte
Weitere Informationen
Johanna Peters - Mechanik hautnah | TU Hamburg
CC BY 4.0-Lizenz
https://learn.hoou.de/pluginfile.php/13818/mod_book/chapter/2177/Berechnung_Momentenvektor_Einzelkraft_raeumlich_Bezugspunkte.png
Ob du schneller im Bestimmen bist, wenn du über das mechanische Verständnis oder das Kreuzprodukt gehst, kannst du nur durch Ausprobieren herausfinden.
Zusammenfassung - Das Wichtigste in Kürze
Vektor vom Bezugspunkt zu einem beliebigen Punkt auf der Wirkungslinie der Kraft,
der Kraftvektor selber.
Denk dran, dass beim Kreuzprodukt die Reihenfolge, in der du die beiden Vektoren miteinander verrechnest, relevant ist.
Bestimmung des Momentenvektors mittels Kreuzprodukt
Weitere Informationen
Johanna Peters - Mechanik hautnah | TU Hamburg
CC BY 4.0-Lizenz
https://learn.hoou.de/pluginfile.php/13818/mod_book/chapter/2177/Rechte_Hand_Regel_Moment_Beispiel.png