Hier bei AquaVenture bekommst du einen Einstieg in die spannende (aber auch herausfordernde) Welt der mobilen Unterwasserrobotik. Um zu erfahren, was du lernst und wie du das Lernangebot erfolgreich absolvierst, klicke auf die Symbole:
Das lernst Du
So lernst Du
Das brauchst Du
Das lernst Du
Was ist eigentlich ein Unterwasserroboter und wofür ist er gut?
Du lernst die Bausteine eines Unterwasserroboters kennen und kannst diese benennen
Du verstehst die Bedeutung von dem Kreislauf des Regelns
Du erarbeitest Dir anhand eines Beispiels, welche Rotoren in welcher Drehrichtung welche Bewegung erzielen
Du erfährst über die verschiedenen Herausforderungen in der Unterwasserrobotik und wie man diese überwinden kann
Am Ende lernst du, wie der Umweltschutz und die Unterwasserrobotik zusammenhängen. Insbesondere in unserem Shorttrack, den wir in diesem letzten Abschnitt verlinkt haben, kannst du darüber mehr erfahren
So lernst Du
Am besten erarbeitest Du Dir den Kursinhalt "von oben nach unten". Zwischendurch erwaten Dich kleine Quizfragen und interaktive Videos.
Das brauchst Du
Um diesen Kurs zu verstehen, ist nicht zwingend Vorwissen über das Thema notwendig. Er richtet sich also an alle unter euch, die ein gewisses Interesse mitbringen, und mit uns in die Welt der Unterwasserrobotik abtauchen wollen.
Los geht's!
Wir wünschen dir viel Spaß beim Entdecken, Lernen und Durchstöbern unseres Lehrangebots.
Was ist eigentlich mit "kleine mobile Unterwasserroboter" gemeint?
Saugroboter, Mähroboter, Pflegeroboter, Industrieroboter; die Liste könnte noch ewig weitergehen. Roboter scheinen heutzutage allgegenwärtig. Dabei stellt sich jedoch die Frage: was genau ist ein Roboter? Inwiefern unterscheidet er sich von einer simplen Maschine oder einem Automaten? Warum sind Roboter nützlich? Und wieso das ganze Unterwasser?
Ein Roboter - Was ist das und wofür ist er gut?
Bemühen wir den Duden, finden wir als eine der Bedeutungen für das Wort Roboter folgenden Satz:
"(mit Greifarmen ausgerüsteter) Automat, der ferngesteuert oder nach Sensorsignalen bzw. einprogrammierten Befehlsfolgen anstelle eines Menschen bestimmte mechanische Tätigkeiten verrichtet".
Ein Roboter soll also Aufgaben für den Menschen erledigen. Ziemlich einleuchtend, der Saugroboter übernimmt das Staubsaugen für den Menschen, der Mähroboter das Rasenmähen, usw. Die Motivation dahinter ist vielfältig. Im Falle des Saugroboters übernimmt der Roboter eine unliebsame Aufgabe für uns - und wir können unsere Zeit mit angenehmeren Dingen verbringen. Häufig sind auch finanzielle Überlegungen der Grund für den Einsatz von Robotern. Ein Industrieroboter, der am Fließband die repetitiven Handgriffe eines Menschen ersetzt, kann im Unterhalt deutlich kostengünstiger sein, als einen Mitarbeiter dafür zu bezahlen. Es kann aber auch sein, dass nicht primär der Kostenfaktor ausschlaggebend ist, sondern Roboter eine Aufgabe mit höherer Präzision ausführen können als wir Menschen, beispielsweise beim Bestücken von sehr kleinen Bauteilen auf elektronischen Platinen.
Warum Unterwasser?
Häufig wird die Erde als blauer Planet bezeichnet. Dies liegt daran, dass Wasser den Großteil der Erdoberfläche ausmacht. Aus industrieller Sicht sind die Weltmeere für den Warentransport mit Schiffen von großer Bedeutung. Im Rahmen der Energiewende werden Offshore-Windparks in küstennahen Gewässern errichtet und Pipelines und Ölbohrplattformen werden schon seit Jahrzenten von Unternehmen im Meer gebaut und betrieben. Hier können Unterwasserroboter Inspektions- und Wartungsaufgaben übernehmen, um frühzeitig Schäden erkennnen und ggf. sogar beheben zu können.
Erinnerst du dich noch an die Sprengung der Nord-Stream-Pipelines 2022? Unter anderem wurde dort auch ein Unterwasserroboter zur Inspektion eingesetzt. Dies ist im folgenden Clip zu sehen.
Aus umweltwissenschaftlicher Sicht ist aber auch das Sammeln von Messwerten relevant. Unterwasserroboter können dabei helfen, automatisiert Messwerte wie die Konzentration bestimmter Schadstoffe, Wassertemperatur, Salzkonzentration, pH-Wert oder die Sauerstoffsättigung des Wassers zu erfassen. Grundsätzlich geht das natürlich auch mit fest installierten Messtationen anstelle von Robotern. Diese sind aber wie der Name schon sagt fest installiert und können ihren Standort nicht ändern. Ein mobiler Roboter erlaubt hier die Messung an frei wählbaren Orten.
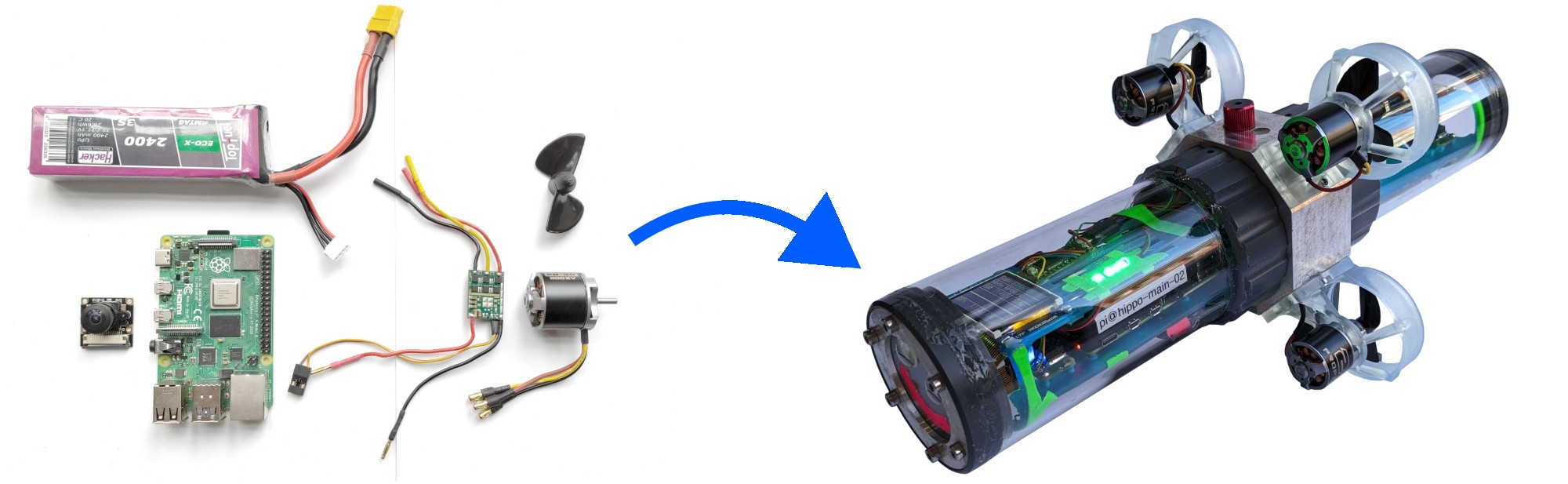
Wie so häufig sagt ein Bild mehr als tausend Worte. Daher zeigt die nachfolgende Abbildung symbolisch was das Lernziel in diesem Abschnitt ist. Wie kommt man von einem Haufen von verschiedenen Bauteilen zu einem fertigen Unterwasserroboter? Klingt kompliziert? Lass dich überraschen — es ist vielleicht einfacher als du denkst!
Bausteine eines Unterwasserroboters von Thies Lennart Alff (CC BY-NC-SA)
Da es eine riesige Anzahl verschiedenster Unterwasserroboter-Typen gibt, wählen wir uns als Beispiel das HippoCampus aus, um uns den Aufbau exemplarisch anzugucken und diesen Abschnitt übersichtlich zu halten.
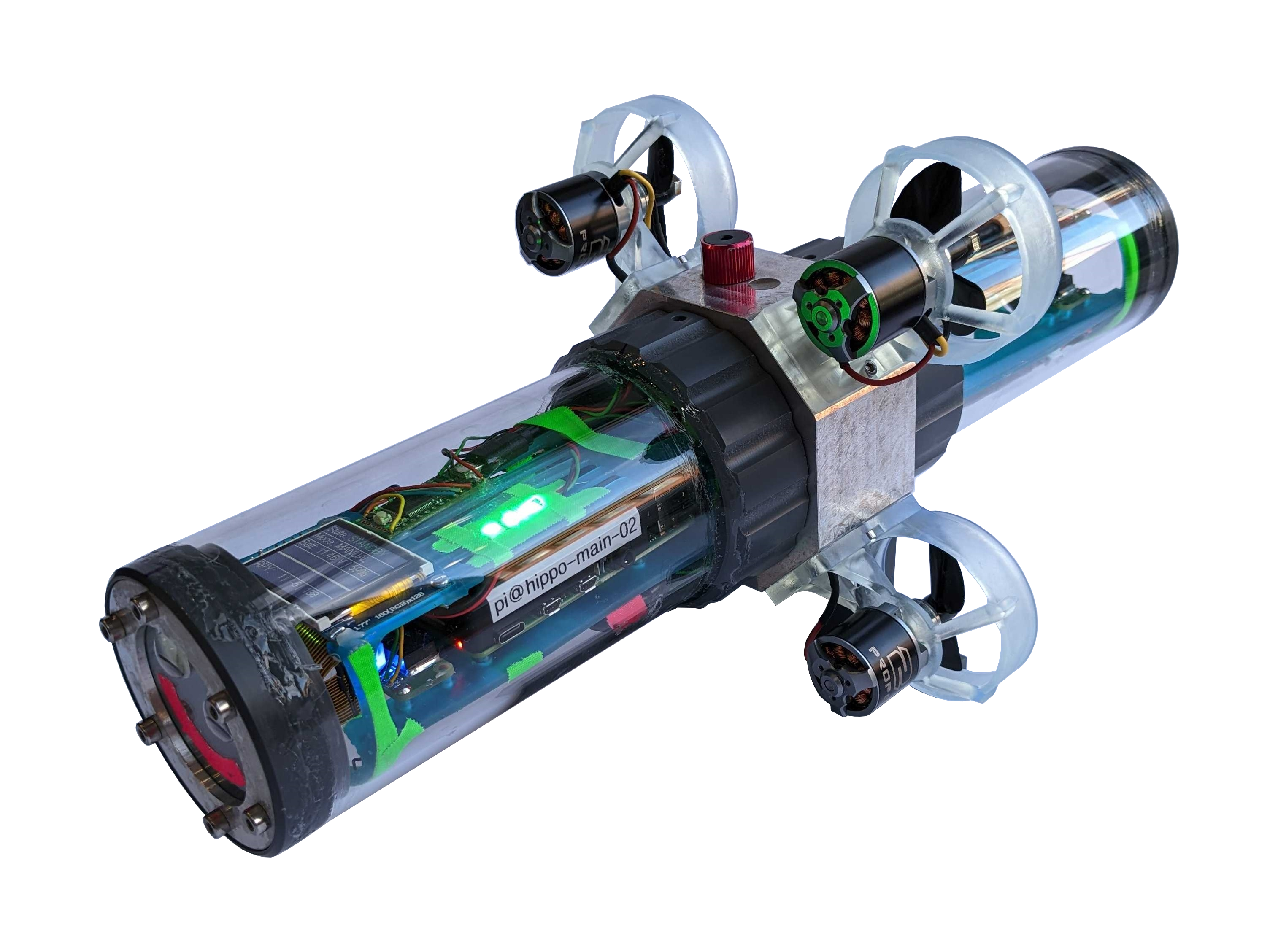
Klar, eine wasserdichte Hülle braucht der Roboter, um die elektronischen Bauteile zu schützen. Und da er mobil sein soll, auch Motoren mit Propellern für den Antrieb - ist ja logisch. Einen kleinen Computer, ein paar Sensoren und Steuereinheiten und einen Akku zur Versorgung der Elektronik und schon hat man alles, was man braucht. Konkret könnte das wie in der folgenden Abbildung aussehen.
hippo-spin-rendered von Lennart Alff (CC BY-NC-SA)
Hippocampus-Freischnitt von Thies Lennart Alff (CC BY-NC-SA)
Dabei handelt es sich um das HippoCampus, welches als selbst entwickelte Roboterplattform am Institut für Mechanik und Meerestechnik der Technischen Universität Hamburg entwickelt wurde, um an sehr kleinen und agilen autonomen Unterwasserrobotern zu forschen. Wenn dich das HippoCampus-Projekt interessiert, kannst du hier mehr darüber erfahren.
Klein ist ein relativer Begriff. Um das hier einmal konkret einzuordnen: der gezeigte Roboter ist ca. 30cm lang oder anders gesagt, er hat in etwa die Länge deines Unterarms. Das Gewicht des Fahrzeugs liegt bei 2kg. In Fachkreisen bezeichnet man einen solchen Roboter als Micro Autonomous Underwater Vehicle (µAUV) - also ein autonomes Mikrounterwasserfahrzeug. Micro weil es klein und leicht ist, Unterwasserfahrzeug, weil es eben wie ein U-Boot unter der Wasseroberfläche fährt. Die Eigenschaft autonom hat an dieser Stelle weniger mit dem physischen Aufbau des Fahrzeugs zu tun als damit, dass es selbstständig und unabhängig agieren soll. Das Fahrzeug wird also nicht ferngesteuert oder arbeitet fest programmierte Befehle ab, sondern agiert abhängig von der Umgebung und den eingehenden Sensordaten.
In der nachfolgenden Abbildung sind die elektronischen Kernkomponenten dargestellt, die das Unterwasserfahrzeug ausmachen. Der Raspberry Pi ist ein Einplatinen-Computer und stellt das Herzstück bzw. das Gehirn des Fahrzeugs dar. Die Kamera ist ein Beispiel für einen Sensor, mit dem der Computer die Umgebung wahrnehmen und erfassen kann. Der Motor mit dem Propeller treibt das Fahrzeug an und wird durch den ESC (electronic speed control, zu deutsch elekronischer Geschwindigkeitsregler) angesteuert, um die Drehrichtung und -geschwindigkeit des Motors einstellen zu können. Die Steuersignale bekommt der dabei vom Einplatinen-Computer. Der Akku versorgt alle Komponenten mit der notwendigen elektrischen Energie.
Bausteine eines Unterwasserroboters Quiz von Josina Gerdes (CC BY-NC-SA)
Einplatinen-Computer bedeutet, dass tatsächlich ein ganzer Computer auf einer einzelenen Platine (das ist die grüne Platte im Bild) untergebracht ist. Diese super kompakte Bauform ist hervorragend für Anwendungsfälle mit begrenztem Platz - also perfekt für ein kleines Unterwasserfahrzeug.
Ausblick
Wir wissen nun, was die wesentlichen Bestandteile eines Unterwasserroboters sind. Zur veranschaulichung haben wir uns dafür das Beispiel des HippoCampus-Fahrzeugs angeschaut. Im nächsten Abschnitt kannst du lernen, wie der Kreislauf aus Wahrnehmung der Umgebung, Planung und Ansteuerung des Roboters grundlegend funktioniert.
Im Prinzip macht ein Unterwasserroboter, der selbstständig agiert, das Gleiche, was auch wir Menschen machen. Nehmen wir mal an, wir sitzen gerade am Schreibtisch und hätten den Entschluss gefasst, dass es an der Zeit ist, zu lüften. Dann müssten wir vom Schreibtisch zum Fenster gehen und es öffnen. Dies schaffen wir vor allem deswegen ohne uns besonders anstrengen zu müssen, weil wir unsere Umgebung mit den Augen wahrnehmen können. So ist es ein leichtes unsere Arme und Beine so zu bewegen, dass wir nicht gegen Gegenstände laufen, die uns auf dem Weg zum Fenster begegnen.
Die Wahrnehmung erfolgt bei Menschen durch die Sinne — Sehen, Tasten, Riechen, Schmecken, Hören. Im obigen Beispiel ist der primäre Wahrnehmungsinn das Sehen. Denkbar wäre es aber auch, sich bei geschlossenen Augen oder Dunkelheit hautpsächlich über den Tastsinn zu orientieren.
Im Falle eines Roboters wäre das Äquivalent für unsere Augen beispielsweise eine Kamera, die fortlaufend Bilder der Umgebung aufzeichnet. Das allein reicht aber noch nicht. Schließlich ist ein sehr wesentlicher Schritt auch noch der des Erkennens. Für uns Menschen ist das häufig sehr leicht, weil wir jahrelange Übung darin haben. Wir sehen unsere Umgebung und können auf dem Weg zum Fenster Hindernisse kinderleicht von einem freien Weg unterscheiden. Kaum einer wird explizit denken "oh, was sehe ich denn da vor mir? Ist es vielleicht eine Bananenschale auf dem Boden?" Wir nehmen sie einfach wahr. Für einen Roboter bzw. Computer ist das schon ganz anders. Ein klassischer Ansatz, um eine Bananenschale zu identifizieren, könnte z.B. sein, zunächst zu prüfen, ob etwas gelbes im Bild ist. Das allein reicht natürlich nicht, denn nicht nur Bananen sind gelb. Es könnte also auch sein, dass wir eine Badeente, einen Tennisball oder ein gelbes Handtuch sehen. Ob es sich überhaupt um ein Hindernis handelt, oder nicht doch nur um einen Lichtreflex oder einen gelben Teppich, der mühelos überfahren werden kann. Wir brauchen also mehr Bewertungskriteren wie beispielsweise die Form. Aber je nachdem aus welcher Perspektive man auf die Banane blickt, kann sich die Form stark unterscheiden. Mit anderen Worten: es ist wirklich herausfordernd über klassische Ansätze Objekte in einem Bild zu identifizieren. Außerdem müssen wir die Bananenschale explizit als Objekt eingeplant haben. Andernfalls könnten wir auch nicht gezielt versuchen, sie zu erkennen. Was ist also, wenn dort ein Fußball liegt? Es ist keine leichte Aufgabe.
Daher wird heutzutage häufig Künstliche Intelligenz (KI) eingesetzt, um diese Art von Problemen zu lösen. Vereinfacht gesagt, wird dabei eine riesige Menge an Bildern mit und ohne Bananenschalen durch ein Neuronales Netz geschoben. Die Voraussetzung ist, dass ein Mensch zuvor festgelegt hat, ob in diesen Bildern jeweils tatsächlich eine Bananenschale zu sehen ist, oder nicht. Und dann wird so lange an den Stellschrauben des Neuronalen Netzes gedreht, bis das Neuronale Netz statistisch ausreichend häufig ein Bild mit einer Banenenschale als solches klassifiziert und ein Bild ohne ebenfalls als ein Bild ohne Bananenschale.
Aufbau eines neuronalen Netzes von Daniel John (CC BY-SA)
Der große Vorteil von KI gegenüber klassischen Ansätzen ist, dass wir nicht mehr händisch Algorithmen und Klassifizierungssysteme entwickeln müssen und dass die Erkennungsrate in vielen Fällen deutlich besser ist.
Das Denken als separaten Schritt im obigen Beispiel zu identifizieren ist schon etwas kniffliger. Dies liegt daran, dass uns vieles, was wir häufig tun, so in Fleisch und Blut übergegangen ist, dass wir gar nicht mehr bewusst darüber nachdenken müssen. Es ist selbstverständlich, dass wir nicht auf die Banenschale im obigen Beispiel treten, ganz ohne dass wir das jedes mal bewusst für uns entscheiden müssen. Für einen Roboter ist das nicht der Fall. Er braucht eine Strategie, um mit der Situtation umgehen zu können. Soll er links oder rechts an der Banenschale vorbei? Ist das Ziel, das Fenster zu erreichen in dieser Situtation überhaupt noch für ihn erreichbar? Oder kann er die Bananenschale sogar einfach ignorieren, weil es für ihn kein Problem ist, einfach darüber hinwegzufahren?
Selten sind diese Entscheidungen fest einprogrammiert, sondern eher allgemein gehalten. Zum Beispiel könnte der Ingenieur, der die Software für den Roboter entwickelt hat, entschieden haben, dass es eine gute Lösung sei, Bananenschalen zu umfahren und dabei den Weg (links oder rechts) zu wählen, der den Roboter am schnellsten zum Zielort bringt. Ob dann der linke oder der rechte Weg der beste ist, hängt davon ab, wo genau sich der Roboter derzeit befindet, wo das Fenster liegt und was für weitere Hindernisse oder Gegenstände der Roboter bisher von seiner Umgebung wahrgenommen hat. Es hat also Vorteile, die Algorithmen so allgemein wie möglich zu implementieren, damit der Roboter mit komplexen Szenarien umgehen kann, ohne dass diese im Voraus genau so eingeplant waren.
Handeln
Wir haben also die Umgebung wahrgenommen und haben uns basierend darauf überlegt, wie wir zum Fenster kommen, um es zu öffnen. Dank jahrelanger Übung unserer motorischen Fertigkeiten, sind wir in der Lage unseren Körper so anzusteuern, dass wir uns mühelos bewegen können. Wir brauchen nicht darüber nachzudenken, wann welcher Fuß nach vorne bewegt werden muss, um zielsicher zum Fenster zu gelangen. Aber dafür brauchte es eben auch eine lange Phase des Lernens. Für Kleinkinder ist es in keiner Weise selbstverständlich, dass sie in der Lage sind, auf beiden Füßen zu stehen und dabei das Gleichgewicht zu halten, geschweige denn zielstrebig voranzuschreiten. Auch in der Robotik fließt viel Arbeit in die Regelung des Roboters. Welche Steuersignale müssen an die Motoren gesendet werden, damit der Roboter die geplante Bewegung auch tatsächlich ausführt? Und was ist, wenn äußere Einflüsse die Bewegung des Roboters verändern? Dann muss entsprechend darauf reagiert und die Steuersignale angepasst werden. Und an der Stelle schließt sich der Regelkreis. Die Schritte Wahrnehmen, Denken, Handeln laufen nicht nur einmal ab, sondern wieder und wieder. Denn die Umgebung ist im Allgemeinen nicht statisch, das heißt, die Bedingungen können sich verändern. Außerdem kann man nicht immer die Umgebung vollständig erfassen, wodurch wir auf dem Weg zum Fenster neue Hindernisse entdecken könnten, die bisher nicht zu sehen waren. Und die Fehler in der Ansteuerung des Roboters müssen korrigiert werden. Denn hat er sich beim Umfahren der Bananenschale etwas zu weit nach links gedreht, sollte er versuchen, das im nächsten Zeitschritt zu korrigieren, um dem geplanten Weg zum Ziel trotzdem gut folgen zu können.
Hier sehen wir zwei unserer Hippocampus-Roboter in voller Aktion. Aber wie bewegen die sich eigentlich genau?
Hippocampus in Aktion von Thies Lennart Alff (CC BY-NC-SA)
Die Motoren
Das HippoCampus haben wir bereits kennengelernt. Es erinnert in seinem Design stark an eine Drohne, bzw. einen Quadrocopter, denn auch das HippoCampus hat vier x-förmig angeordnete Motoren mit Propellern. Die Motoren sind allerdings im Vergleich um 90° rotiert. Sie zeigen also, anders als beim Quadrocopter, nicht nach oben, sondern nach vorne. Und dafür gibt es natürlich einen guten Grund.
Während die Drohne, um in der Luft zu schweben, permanent gegen die Schwerkraft arbeiten muss, ist das unter Wasser typischerweise nicht der Fall. Wenn man den Unterwasserroboter geschickt entwickelt, „schwebt" er quasi von allein im Wasser. Dazu muss das Volumen des Roboters genau so gewählt werden, dass die Gewichtskraft durch die Auftriebskraft ausgeglichen wird. Und während die Drohne sich damit abmühen muss, nicht von der Erdanziehungskraft zurück auf den Boden gezogen zu werden, kann das HippoCampus (und natürlich auch andere Unterwasserroboter) mühelos wie ein Fisch durchs Wasser gleiten. Daher zeigen die Motoren von Unterwasserrobotern in die Richtung, in die hauptsächlich Kraft aufgebracht werden muss, also in Fahrtrichtung.
Die Bewegungsarten
Ein freier Körper im dreidimensionalen Raum kann grundsätzlich sechs verschiedene unabhängige Bewegungen durchführen. Er hat eine Position, die aus drei verschiedenen Translastionen besteht:
vorwärts/rückwärts
links/rechts
oben/unten
Analog dazu auch die Verdrehung des Körpers mit ebenfalls drei Komponenten.
Drehung im die Längsachse (rollen)
Drehung um die Querachse (nicken)
Drehung um die Hochachse (gieren)
Bei einer Motoranordnung wie beim HippoCampus kann das Fahrzeug unmittelbar vier der sechs möglichen Bewegungsarten direkt durchführen. Das folgende Video stellt dies Anschaulich dar.
Bewegungsmöglichkeiten von Thies Lennart Alff (CC BY-NC-SA)
Die Rollbewegung des Fahrzeugs unterscheidet sich, wie auch aus dem Video hervorging, qualitativ von den anderen Bewegungen. In diesem Zusammenhang die Frage: Ist Dir aufgefallen, dass die Propeller nicht alle gleich waren? Die Blätter eines Propellers sind genau umgekehrt angewinkelt als der nächste Propeller im oder gegen den Uhrzeigersinn neben ihm. Wir werden uns das im nächsten Video noch mal im Detail angucken.
Der Grund für die verschiedenen Propeller hat direkt mit der Rollbewegung des Fahrzeugs zu tun. Damit alle Propeller Schub in Vorwärtsrichtung erzeugen, müssen die Propeller oben links und unten rechts in die andere Richtung drehen als Propeller auf der anderen Diagonalen. Schauen wir uns das im Video an!
Fahrzeugaktuierung von Thies Lennart Alff (CC BY-NC-SA)
Jetzt können wir uns schon recht gut vorstellen, wie das Fahrzeug seinen Schub erzeugt. Zusätzlich haben wir geklärt, was passiert, wenn alle Propeller in dieselbe Richtung drehen. Dann erzeugt die eine Hälfte der Propeller Schub in Vorwärtsrichtung und die andere in Rückwärtsrichtung. Dadurch fährt das Fahrzeug weder nach vorne noch nach hinten, weil sich der Schub ausgleicht. Und auch nicken oder gieren wird das Fahrzeug nicht, weil sich die Propeller da genau ausgleichen. Durch die Rotation in dieselbe Richtung erzeugen die Fahrzeuge ein Drehmoment um die Längsachse, also die Vorwärtsachse entgegen ihrer Drehrichtung. Das Hippocampus beginnt also zu rollen.
Das Phänomen kennst du höchstwahrscheinlich aus deinem Alltag. Wenn man einen Pürierstab einschaltet, spürt man deutlich, dass er „versucht", sich entgegen der Drehrichtung seiner Rotorblätter zu drehen und man ihn gut festhalten muss, um das zu verhindern.
Ein Vergleich, den wir in diesem Lernangebot häufig bemühen, ist der von Unterwasserrobotern mit Drohnen. Das liegt daran, dass sich beide Fahrzeugkategorien auf ähnliche Weise durch den dreidimensionalen Raum bewegen und anders als Landroboter oder Autos nicht primär auf die Bewegung in der Ebene des Bodens angewiesen sind.
Außerdem bietet es sich aus Sicht der Wissenschaft an, die sich mit Unterwasserrobotik beschäftigt, das Rad nicht von Grund auf neu erfinden zu wollen. Stattdessen wird versucht, bekannte Methoden und Erkenntnisse aus anderen Forschungsbereichen zu übertragen. Während die Unterwasserrobotik im Vergleich ein Nischendasein in Forschung und Industrie fristet, haben es die Drohnen schon bis in unseren Lebensalltag hinein geschafft.
Man könnte jederzeiz zum nächsten Mediamarkt oder Saturn gehen und sich eine Drohne kaufen. Dies ist ein Indikator dafür, dass die Drohnentechnologie schon so weit fortgescrhitten ist, dass sie den reinen Forschungs- und Prototypenbereich verlassen hat und fertige Produkte den Verbrauchermarkt erreicht haben. Bei Unterwasserrobotern ist das nicht der Fall.
Ist es nun nicht naheliegend, alle Erkenntnisse aus der Drohnenforschung auf Unterwasserroboter anzuwenden und früh Feierabend zu machen? Wo die Probleme dabei liegen können und warum trotz aller Ähnlichkeit von Robotern Über- und Unterwasseranwendungen doch signifikante Unterschiede und damit verbundene Herausforderungen aufweisen, erfährst Du in diesem Abschnitt.
Kommunikation und Datenübertragung
Ein Sprichwort sagt
Der Fisch bemerkt das Wasser als letzter.
Ganz anders geht es uns, wenn wir mit Unterwasserrobotern arbeiten. Dort bemerkt man den Einfluss des Wassers ziemlich schnell. Besonders dann, wenn Daten zwischen den Robotern und anderen Geräten oder auch zwischen verschiedenen Robotern untereinander ausgetauscht werden sollen.
Wie macht man das an Land?
An Land ist eine sehr häufig genutzte Technologie zum drahtlosen Austausch von Daten das WLAN. Alternativ je nach Anforderungen auch Bluetooth. Das kennen wir auch aus unserem normalen Alltag, Laptops und Smartphones verbinden wir mit dem WLAN, unsere drahtlosen Kopfhörer oder Lautsprecher bekommen die Musik über Bluetooth gesendet.
Geht das nicht auch unter Wasser?
Grundsätzlich ist dies natürlich der naheliegende Gedanke. Als erstes das unter Wasser versuchen, was sich über Wasser bewährt hat. Das Problem dabei ist, dass Wasser im Gegensatz zu Luft elektromagnetische Wellen stark dämpft. Und WLAN- und Bluetoothsignale sind eben elektromagnetische Wellen. Das heißt, statt bis zu hundert Meter Reichweite sind es häufig nur noch Zentimeter.
Gundsätzlich gilt, je höher die Frequenz, desto stärker wird das Signal vom Wasser gedämpft bzw. absorbiert. Sowohl WLAN als auch Bluetooth operieren im Frequenzbereich 2.4GHz. Wusstest Du, dass dies ebenso für Mikrowellen gilt? Die erzeugen elektromagnetische Wellen, um damit die Wassermoleküle zum Schwingen anzuregen und so zu erwärmen. Dabei geht die Energie der elektromagnetischen Wellen ans Wasser über. Was für die Funktion der Mikrowelle gewünscht ist, ist für die Unterwasserkommunikation ein Problem. Statt miteinander zu kommunizieren, würden die Roboter einfach nur das Wasser erwärmen...
Was sind dann mögliche Lösungsansätze?
Man kann sich von der Natur inspirieren lassen. Wale kommunizieren über lange Distanzen mit akustischen Signalen, den sogenannten Walgesängen. Grundsätzlich bewegt sich Schall unter Wasser sehr viel schneller und weiter als in der Luft. Trotzdem erreicht man damit nicht mal Ansatzweise die Übertragungsraten wie mit WLAN. Schallwellen sind nämlich deutlich länger und niederfrequenter.
Ein Beispiel: Das an der TU Hamburg entwickelte Ahoi-Modem kann Daten mit einer Rate von 250-4500 bit/s übertragen. Möchte man damit beispielsweise ein typisches Handyfoto übertragen, würde das bis zu zwei Tage dauern! Man kann sich vorstellen, dass dies nicht praktikabel ist. Über WLAN hingegen wäre eine Übertragung in Sekundenbruchteilen möglich.
Lokalisierung
Wir haben im vorigen Abschnitt gelernt, dass die drahtlose Kommunikation mit elektromagnetischen Wellen unter Wasser große Probleme hat. Zum Glück ist das für die Lokalisierung kein Problem. Oder? Oder?!
Elektromagnetisch
Dafür müssen wir erstmal wissen, wie ein Roboter überhaupt seine Position ermitteln kann. Woher weiß das Navigationssystem eines Autos, eines Flugzeuges oder unser Smartphone wo es ist? Dank GPS (Global Positioning System). Dafür kommuniziert der GPS-Empfänger des jeweiligen Geräts mit GPS-Satteliten im Erdorbit. Und wenn hier schon wieder von Kommunikation die Rede ist, lässt das schon Böses ahnen. Auch diese Art der Datenübertragung funktioniert mittels elektromagnetischer Wellen und hat somit eine äußerst begrenzte Reichweite. In der Praxis lässt sich die Positionsbestimmung so also nicht realisieren.
Akustisch
Ebenso wie bei der Kommunikation sind akustische Signale eine Alternative. Den Begriff Sonar hast Du vielleicht schon gehört. Dabei geht es darum, mittels akustischer Signale herauszufinden, wo sich der Roboter relativ zu bekannten Ankerpositionen befindet.
Im einfachsten Fall wird dazu die Laufzeit eines akustischen Signals gemessen und davon auf die Distanz zurückgeschlossen. Die Ausbreitungsgeschwindigkeit ist abhängig von Wassertemperatur, der -tiefe und des Salzgehaltes des Wassers und beträgt ca. 1480 m/s. Konkret heißt das, wenn man eine Laufzeit des Signals von 1 s misst, haben Sender und Empfänger einen Abstand von 1480 m. Nun kennt man dann noch nicht die Position, aber man weiß, dass sich der Empfänger auf einer Kreisbahn mit einem Radius von 1480 m um den Sender herum befindet. Kombiniert man dies mit Messungen anderer Sender von verschiedenen Orten, kann die Position durch Multilateration bestimmt werden. Klingt kompliziert, ist aber eigentlich ganz einfach. Man kann sich das geometrisch so vorstellen, dass wir für jede Signallaufzeit von jedem Sender zu unserem Roboter-Empfänger die Distanz bestimmen und um jeden Sender einen Kreis mit dem entsprechenden Radius malen. Dort wo sich die Kreise schneiden muss die Position des Roboters sein.
Quizfrage Lokalisierung von Josina Gerdes (CC BY-NC-SA)
Ist damit jetzt das Problem gelöst? Nicht ganz. Zwei große Probleme bestehen auch bei der akustischen Lokalisierung. Zum einen werden die bekannten Senderposition benötigt. Bzw. ein solcher Sender muss überhaupt erstmal vorhanden sein. Das heißt, eine entsprechende Infrastruktur muss für den jeweiligen Anwendungsfall aufgebaut werden. Während GPS-Satelliten bereits in ausreichender Stückzahl vorhanden sind, um eine Weltweite Abdeckung sicherzustellen. Und zum anderen ist die verhältnismäßig langsame Ausbreitung der akustischen Signale ein Problem. Wenn ein Signal 1 s bis zum Empfänger braucht, hat sich der Roboter in der Zwischenzeit schon weiterbewegt, was die Messung verändert und somit zu fehlerhaften Ergebnissen führt.
Visuell
Eine dritte Möglichkeit der Lokalisierung ist die visuelle. Darauf greifen Drohnen (neben GPS) zurück, um Objekte zu erkennen und Hindernissen auszuweichen.
Man kann diese in zwei Kategorien teilen: Zum einen in Onboard-Lokalisierung, das heißt, die Kamera und die Verarbeitung der Daten findet direkt auf dem Roboter selbst statt und zum anderen die externe Lokalisierung, durch Motion-Capture-Systeme. Letzeres kennst Du vielleicht aus der Animations-Film-Produktion oder Videospielentwicklung. Dort werden Bewegungen von Menschen durch Kameras aufgenommen, indem kleine kugelförmige Marker an ihnen angebracht werden. Diese Bewegungen werden dann auf 3D-Modelle übertragen, um die Bewegungen möglichst natürlich aussehen zu lassen. In der Robotik kann man dieselben Systeme verwenden, um die Position des Roboters zu bestimmen.
Motion Capture Marker an einem Hippocampus von Josina Gerdes (CC BY-NC-SA)
Die grundsätzliche Funktionsweise ist für beide Arten der Lokalisierung gleich. Die verwendete Kamera(s) wird kalibriert, um Verzerrungen (z.B. die stark gewölbten Linien bei einer Fischaugenlinse) zu korrigieren. Anschließend wird versucht über geeignete Algorithmen bestimmte Umgebungseigenschaften des Roboters zu erkennen. Weiß man wie diese Bildpunkte relativ zueinander stehen, kann man das sogenannte „perspektivische n-Punkt-Problem" lösen und damit die Kamerapose in Relation zur Umgebung bestimmen. Die Umgebungseigenschaften kann man im einfachsten Fall durch visuelle Marker darstellen, z.B. durch sogenannte AprilTags (vereinfacht gesagt, sowas ähnliches wie QR-Codes).
Wenn dich das Thema Kamerakalibrierung interessiert, findest Du hier mehr Informationen darüber. Und hier wird die Posen-Schätzung basierend auf einem Kamerabild mithilfe der quelloffenen Computer-Vision-Bibliothek openCV erläutert. Beide Beispiele zeigen Schritt-für-Schritt-Anleitungen mit der Programmiersprache Python. Falls Du das auch gerne mal ausprobieren möchtest, aber dich noch nicht mit Python auskennst, gibt es dafür ein entsprechndes Lernangebot der HOOU.
Ist diese Methode nun der heilige Gral unter den Lokalisierungsmethoden? Leider nicht wirklich. Es ist gut geeignet für Anwendungsfälle, in denen das Wasser sehr klar ist. Beispielsweise, wenn ein Unterwasserroboter das mit Wasser gefüllte Abklingbecken eines Atomkraftwerks untersuchen soll. In natürlichen Gewässern ist aber häufig die Trübung des Wassers so stark, dass man kaum etwas erkennen kann. Das kannst Du in einem Praxisbeispiel in nachfolgendem Video sehen. Dort wird ein Unterwasserroboter in einen Elbkanal geworfen.
Naturschutz mit Unterwasserrobotern - ist das möglich? Na klar. Die Einsatzmöglichkeiten sind vielfältig: Von der reinen Überwachung von Meeresverschmutzung, Korallenriffen, Populationszahlen und der Biodiversität bis hin zur aktiven Abfallbeseitigung und der Restaurierung von Meeresökosystemen. Der Einsatz von Unterwasserrobotern wird immer atrraktiver, vor allem in Gewässern, die für Menschen unzugänglich oder sehr gefährlich sind.
Das Problem? Unter der Wasseroberfläche stößt man auf ganz andere Herausforderungen, als über Wasser. Wie im vorherigen Abschnitt bereits ausführlich beschrieben, können Unterwasserroboter im Gegensatz zu Drohnen kein GPS zur Lokalisierung oder WLAN zur Kommunikation nutzen. Besonders bei der Übertragung von großen Datenmengen ist man immernoch auf eine physische Verbindung mit einem Kabel angewiesen. Gerade deshalb ist die Forschung in diesem Bereich so wichtig.
Ein anschauliches Beispiel zum Thema Umweltschutz und Unterwasserrobotik haben wir im Format Wissenschaft kurz erklärt dargestellt. Du kannst es im Lernangebot der HOOU unter dem Stichwort Aquaventure finden oder es direkt über diesen Link aufrufen.

 Wahrnehmen
Wahrnehmen 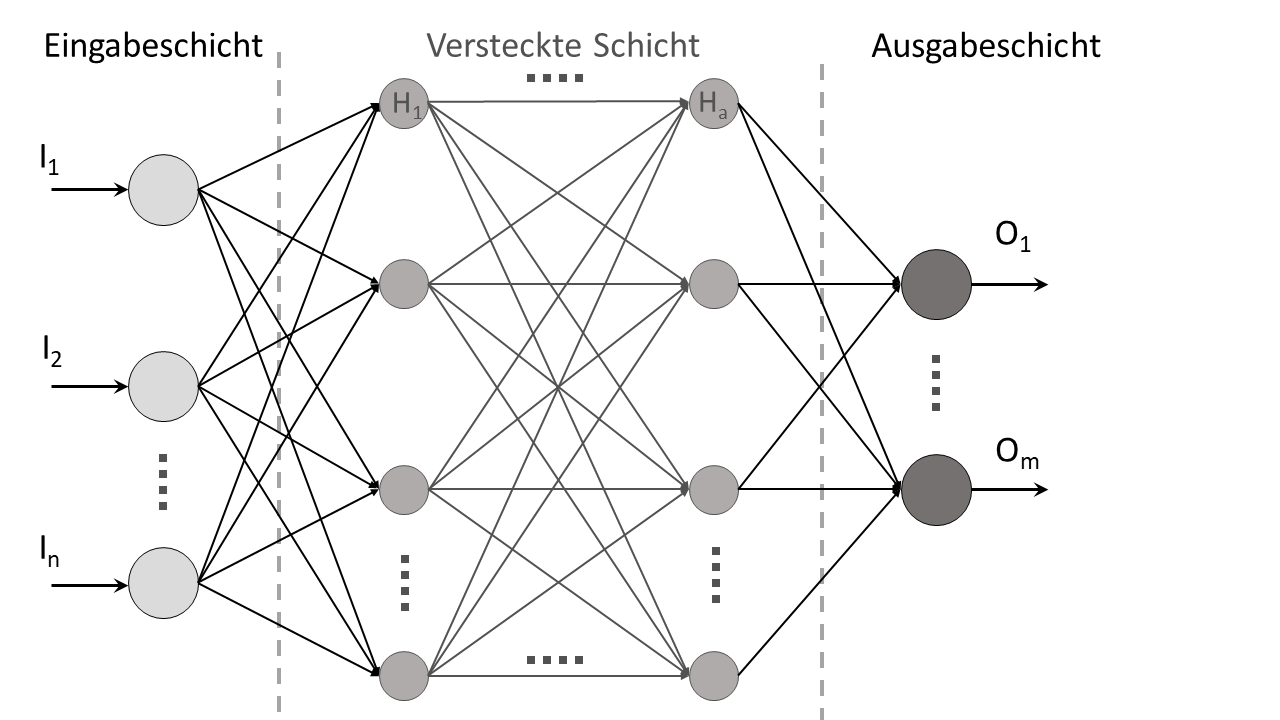
 Denken
Denken Handeln
Handeln
 Elektromagnetisch
Elektromagnetisch Akustisch
Akustisch
 Visuell
Visuell