Wahrnehmen-Denken-Handeln - Der Kreislauf des Regelns
Abschnittsübersicht
-
-
Ein Beispiel
Im Prinzip macht ein Unterwasserroboter, der selbstständig agiert, das Gleiche, was auch wir Menschen machen. Nehmen wir mal an, wir sitzen gerade am Schreibtisch und hätten den Entschluss gefasst, dass es an der Zeit ist, zu lüften. Dann müssten wir vom Schreibtisch zum Fenster gehen und es öffnen. Dies schaffen wir vor allem deswegen ohne uns besonders anstrengen zu müssen, weil wir unsere Umgebung mit den Augen wahrnehmen können. So ist es ein leichtes unsere Arme und Beine so zu bewegen, dass wir nicht gegen Gegenstände laufen, die uns auf dem Weg zum Fenster begegnen.

("Wahrnehmen, Denken, Handeln" von Josina Gerdes (CC BY-NC-SA) Grafik erstellt mit Icons von Smashicons, Iconjam und cube29 - Flaticon) Übertragung auf die Regelung
 Wahrnehmen
Wahrnehmen Die Wahrnehmung erfolgt bei Menschen durch die Sinne — Sehen, Tasten, Riechen, Schmecken, Hören. Im obigen Beispiel ist der primäre Wahrnehmungsinn das Sehen. Denkbar wäre es aber auch, sich bei geschlossenen Augen oder Dunkelheit hautpsächlich über den Tastsinn zu orientieren.
Im Falle eines Roboters wäre das Äquivalent für unsere Augen beispielsweise eine Kamera, die fortlaufend Bilder der Umgebung aufzeichnet. Das allein reicht aber noch nicht. Schließlich ist ein sehr wesentlicher Schritt auch noch der des Erkennens. Für uns Menschen ist das häufig sehr leicht, weil wir jahrelange Übung darin haben. Wir sehen unsere Umgebung und können auf dem Weg zum Fenster Hindernisse kinderleicht von einem freien Weg unterscheiden. Kaum einer wird explizit denken "oh, was sehe ich denn da vor mir? Ist es vielleicht eine Bananenschale auf dem Boden?" Wir nehmen sie einfach wahr. Für einen Roboter bzw. Computer ist das schon ganz anders. Ein klassischer Ansatz, um eine Bananenschale zu identifizieren, könnte z.B. sein, zunächst zu prüfen, ob etwas gelbes im Bild ist. Das allein reicht natürlich nicht, denn nicht nur Bananen sind gelb. Es könnte also auch sein, dass wir eine Badeente, einen Tennisball oder ein gelbes Handtuch sehen. Ob es sich überhaupt um ein Hindernis handelt, oder nicht doch nur um einen Lichtreflex oder einen gelben Teppich, der mühelos überfahren werden kann. Wir brauchen also mehr Bewertungskriteren wie beispielsweise die Form. Aber je nachdem aus welcher Perspektive man auf die Banane blickt, kann sich die Form stark unterscheiden. Mit anderen Worten: es ist wirklich herausfordernd über klassische Ansätze Objekte in einem Bild zu identifizieren. Außerdem müssen wir die Bananenschale explizit als Objekt eingeplant haben. Andernfalls könnten wir auch nicht gezielt versuchen, sie zu erkennen. Was ist also, wenn dort ein Fußball liegt? Es ist keine leichte Aufgabe.
Daher wird heutzutage häufig Künstliche Intelligenz (KI) eingesetzt, um diese Art von Problemen zu lösen. Vereinfacht gesagt, wird dabei eine riesige Menge an Bildern mit und ohne Bananenschalen durch ein Neuronales Netz geschoben. Die Voraussetzung ist, dass ein Mensch zuvor festgelegt hat, ob in diesen Bildern jeweils tatsächlich eine Bananenschale zu sehen ist, oder nicht. Und dann wird so lange an den Stellschrauben des Neuronalen Netzes gedreht, bis das Neuronale Netz statistisch ausreichend häufig ein Bild mit einer Banenenschale als solches klassifiziert und ein Bild ohne ebenfalls als ein Bild ohne Bananenschale.
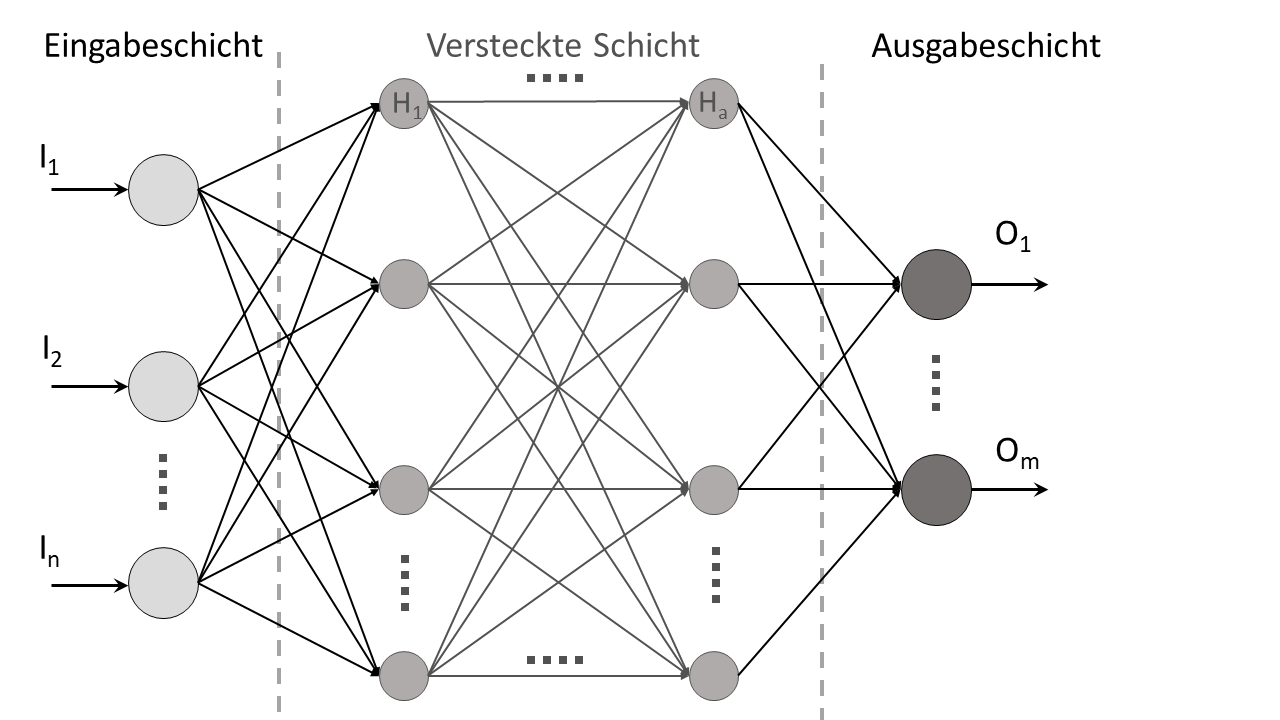
Aufbau eines neuronalen Netzes von Daniel John (CC BY-SA) Der große Vorteil von KI gegenüber klassischen Ansätzen ist, dass wir nicht mehr händisch Algorithmen und Klassifizierungssysteme entwickeln müssen und dass die Erkennungsrate in vielen Fällen deutlich besser ist.
In den weiteren Lernangeboten der HOOU kannst du mehr über Neuronale Netze und Künstliche Intellligenz im Allgemeinen erfahren. Denken
DenkenDas Denken als separaten Schritt im obigen Beispiel zu identifizieren ist schon etwas kniffliger. Dies liegt daran, dass uns vieles, was wir häufig tun, so in Fleisch und Blut übergegangen ist, dass wir gar nicht mehr bewusst darüber nachdenken müssen. Es ist selbstverständlich, dass wir nicht auf die Banenschale im obigen Beispiel treten, ganz ohne dass wir das jedes mal bewusst für uns entscheiden müssen. Für einen Roboter ist das nicht der Fall. Er braucht eine Strategie, um mit der Situtation umgehen zu können. Soll er links oder rechts an der Banenschale vorbei? Ist das Ziel, das Fenster zu erreichen in dieser Situtation überhaupt noch für ihn erreichbar? Oder kann er die Bananenschale sogar einfach ignorieren, weil es für ihn kein Problem ist, einfach darüber hinwegzufahren?
Selten sind diese Entscheidungen fest einprogrammiert, sondern eher allgemein gehalten. Zum Beispiel könnte der Ingenieur, der die Software für den Roboter entwickelt hat, entschieden haben, dass es eine gute Lösung sei, Bananenschalen zu umfahren und dabei den Weg (links oder rechts) zu wählen, der den Roboter am schnellsten zum Zielort bringt. Ob dann der linke oder der rechte Weg der beste ist, hängt davon ab, wo genau sich der Roboter derzeit befindet, wo das Fenster liegt und was für weitere Hindernisse oder Gegenstände der Roboter bisher von seiner Umgebung wahrgenommen hat. Es hat also Vorteile, die Algorithmen so allgemein wie möglich zu implementieren, damit der Roboter mit komplexen Szenarien umgehen kann, ohne dass diese im Voraus genau so eingeplant waren.
 Handeln
HandelnWir haben also die Umgebung wahrgenommen und haben uns basierend darauf überlegt, wie wir zum Fenster kommen, um es zu öffnen. Dank jahrelanger Übung unserer motorischen Fertigkeiten, sind wir in der Lage unseren Körper so anzusteuern, dass wir uns mühelos bewegen können. Wir brauchen nicht darüber nachzudenken, wann welcher Fuß nach vorne bewegt werden muss, um zielsicher zum Fenster zu gelangen. Aber dafür brauchte es eben auch eine lange Phase des Lernens. Für Kleinkinder ist es in keiner Weise selbstverständlich, dass sie in der Lage sind, auf beiden Füßen zu stehen und dabei das Gleichgewicht zu halten, geschweige denn zielstrebig voranzuschreiten. Auch in der Robotik fließt viel Arbeit in die Regelung des Roboters. Welche Steuersignale müssen an die Motoren gesendet werden, damit der Roboter die geplante Bewegung auch tatsächlich ausführt? Und was ist, wenn äußere Einflüsse die Bewegung des Roboters verändern? Dann muss entsprechend darauf reagiert und die Steuersignale angepasst werden. Und an der Stelle schließt sich der Regelkreis. Die Schritte Wahrnehmen, Denken, Handeln laufen nicht nur einmal ab, sondern wieder und wieder. Denn die Umgebung ist im Allgemeinen nicht statisch, das heißt, die Bedingungen können sich verändern. Außerdem kann man nicht immer die Umgebung vollständig erfassen, wodurch wir auf dem Weg zum Fenster neue Hindernisse entdecken könnten, die bisher nicht zu sehen waren. Und die Fehler in der Ansteuerung des Roboters müssen korrigiert werden. Denn hat er sich beim Umfahren der Bananenschale etwas zu weit nach links gedreht, sollte er versuchen, das im nächsten Zeitschritt zu korrigieren, um dem geplanten Weg zum Ziel trotzdem gut folgen zu können.
-