Die Bausteine eines Unterwasserroboters
Abschnittsübersicht
-
Wie so häufig sagt ein Bild mehr als tausend Worte. Daher zeigt die nachfolgende Abbildung symbolisch was das Lernziel in diesem Abschnitt ist. Wie kommt man von einem Haufen von verschiedenen Bauteilen zu einem fertigen Unterwasserroboter? Klingt kompliziert? Lass dich überraschen — es ist vielleicht einfacher als du denkst!
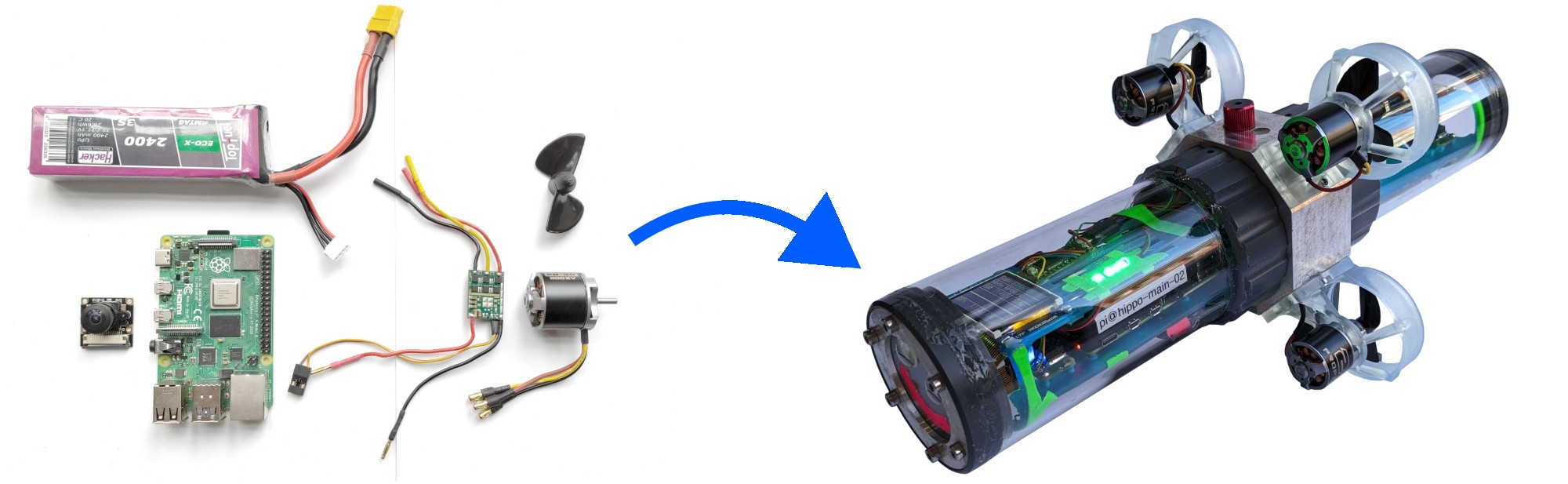
Bausteine eines Unterwasserroboters von Thies Lennart Alff (CC BY-NC-SA) Da es eine riesige Anzahl verschiedenster Unterwasserroboter-Typen gibt, wählen wir uns als Beispiel das HippoCampus aus, um uns den Aufbau exemplarisch anzugucken und diesen Abschnitt übersichtlich zu halten.
-
Klar, eine wasserdichte Hülle braucht der Roboter, um die elektronischen Bauteile zu schützen. Und da er mobil sein soll, auch Motoren mit Propellern für den Antrieb - ist ja logisch. Einen kleinen Computer, ein paar Sensoren und Steuereinheiten und einen Akku zur Versorgung der Elektronik und schon hat man alles, was man braucht. Konkret könnte das wie in der folgenden Abbildung aussehen.
hippo-spin-rendered von Lennart Alff (CC BY-NC-SA)
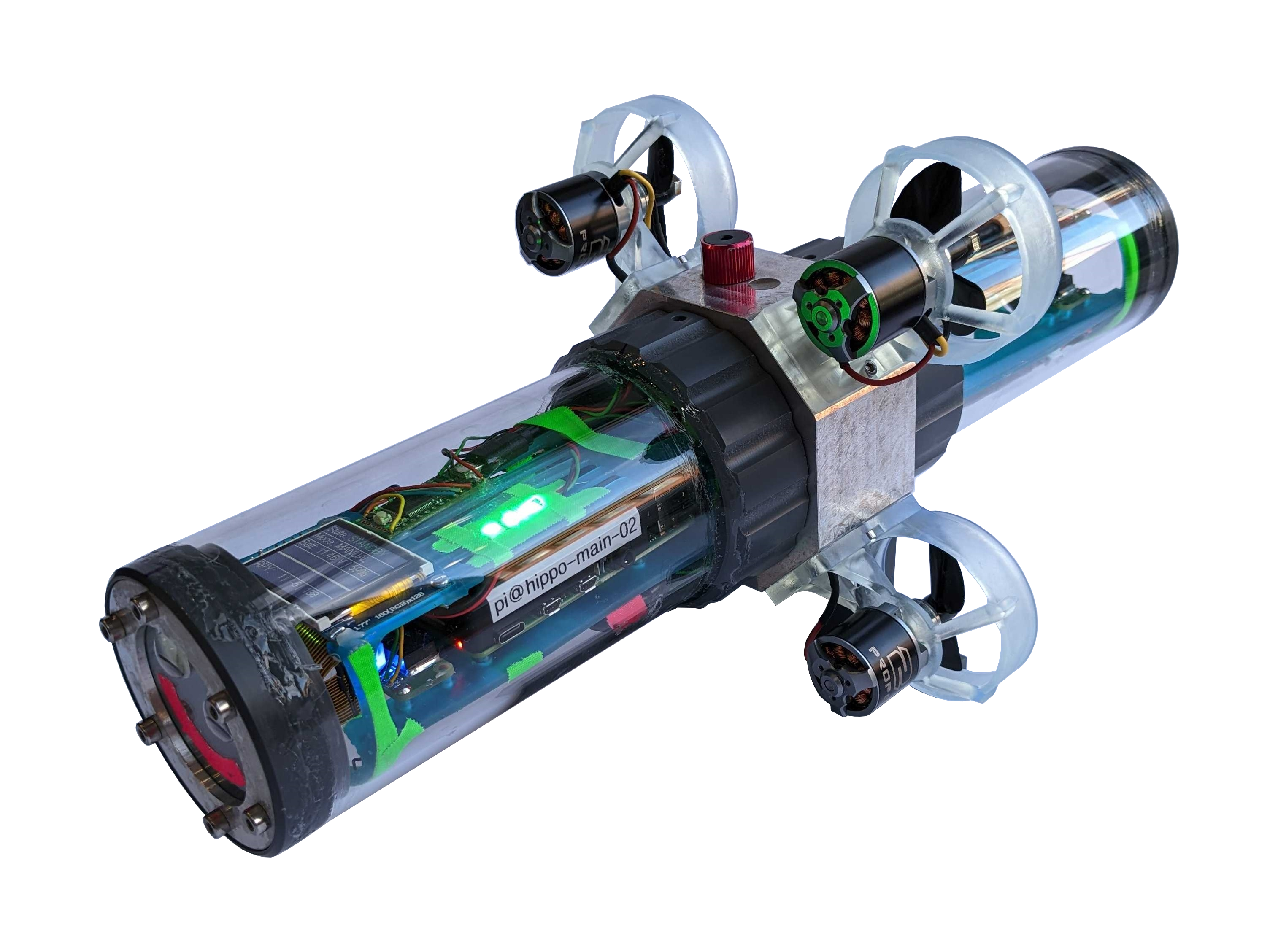
Hippocampus-Freischnitt von Thies Lennart Alff (CC BY-NC-SA) Dabei handelt es sich um das HippoCampus, welches als selbst entwickelte Roboterplattform am Institut für Mechanik und Meerestechnik der Technischen Universität Hamburg entwickelt wurde, um an sehr kleinen und agilen autonomen Unterwasserrobotern zu forschen. Wenn dich das HippoCampus-Projekt interessiert, kannst du hier mehr darüber erfahren.
Klein ist ein relativer Begriff. Um das hier einmal konkret einzuordnen: der gezeigte Roboter ist ca. 30cm lang oder anders gesagt, er hat in etwa die Länge deines Unterarms. Das Gewicht des Fahrzeugs liegt bei 2kg. In Fachkreisen bezeichnet man einen solchen Roboter als Micro Autonomous Underwater Vehicle (µAUV) - also ein autonomes Mikrounterwasserfahrzeug. Micro weil es klein und leicht ist, Unterwasserfahrzeug, weil es eben wie ein U-Boot unter der Wasseroberfläche fährt. Die Eigenschaft autonom hat an dieser Stelle weniger mit dem physischen Aufbau des Fahrzeugs zu tun als damit, dass es selbstständig und unabhängig agieren soll. Das Fahrzeug wird also nicht ferngesteuert oder arbeitet fest programmierte Befehle ab, sondern agiert abhängig von der Umgebung und den eingehenden Sensordaten.
In der nachfolgenden Abbildung sind die elektronischen Kernkomponenten dargestellt, die das Unterwasserfahrzeug ausmachen. Der Raspberry Pi ist ein Einplatinen-Computer und stellt das Herzstück bzw. das Gehirn des Fahrzeugs dar. Die Kamera ist ein Beispiel für einen Sensor, mit dem der Computer die Umgebung wahrnehmen und erfassen kann. Der Motor mit dem Propeller treibt das Fahrzeug an und wird durch den ESC (electronic speed control, zu deutsch elekronischer Geschwindigkeitsregler) angesteuert, um die Drehrichtung und -geschwindigkeit des Motors einstellen zu können. Die Steuersignale bekommt der dabei vom Einplatinen-Computer. Der Akku versorgt alle Komponenten mit der notwendigen elektrischen Energie.
Bausteine eines Unterwasserroboters Quiz von Josina Gerdes (CC BY-NC-SA) Einplatinen-Computer bedeutet, dass tatsächlich ein ganzer Computer auf einer einzelenen Platine (das ist die grüne Platte im Bild) untergebracht ist. Diese super kompakte Bauform ist hervorragend für Anwendungsfälle mit begrenztem Platz - also perfekt für ein kleines Unterwasserfahrzeug.
-